Sobre NASA Swarmathon
NASA Swarmathon es un desafío para desarrollar mediante robótica y codiga una manera para revolucionar la exploración espacial. Los estudiantes serán desafiados a desarrollar algoritmos de búsqueda para “robotic swarms”. La finalidad es mejorar las habilidades de los estudiantes en robotica y ciencias de computacion y lograr avances en la tecnología para futuras misiones de exploración espacial de la NASA.
2017-2018

Durante el tiempo de la investigación, se ejecutó pruebas exhaustivas en simulación virtual, ya no se pudo hacer las pruebas físicas debido al huracán María que dañó nuestras instalaciones. Los algoritmos cuales fueron probados fue las de búsqueda de líneas, búsqueda de estrellas y Zig-Zag. Al final, llegaron a la conclusión de que el mejor algoritmo de búsqueda era Zig-Zag, ya que demostró mejoras significativas en el código base.
Algoritmo de búsqueda lineal
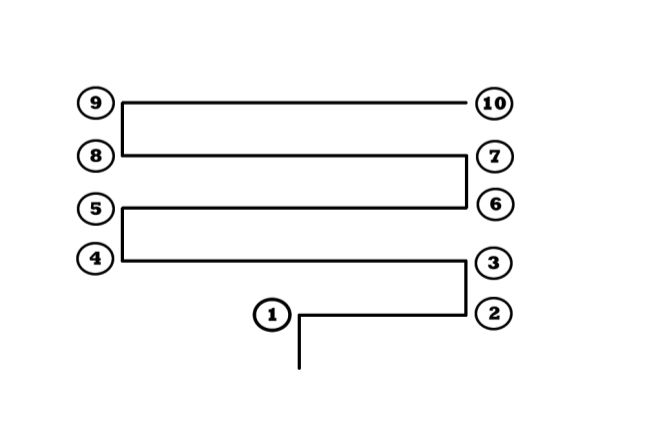
Este algoritmo consiste en una serie de líneas paralelas. Esta es una forma simple pero efectiva de cubrir el terreno y buscar elementos. En la investigacion, se crearon diez waypoints, cada uno de los cuales representa una esquina en el patrón de búsqueda lineal. Cada waypoint se establece mediante el cálculo de la ubicación de búsqueda del swarmie en función de su ubicación actual, dependiendo del waypoint. Cada waypoints par representan las líneas paralelas que cubren el ancho de la pista, mientras que los waypoints impares representan la conexión entre las líneas paralelas.
Algoritmo de búsqueda de estrella
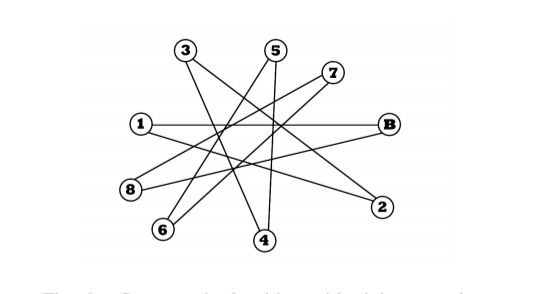
Este tipo de búsqueda proviene de algoritmos genéticos. Como no se pudo implementar el concepto completo de que cada swarmie pudiera comunicarse entre sí y notificando donde hay una mayor probabilidad de ser recogido, intentaron diseñar un concepto que pudiera simular la mayor cantidad en el recogido.
Algoritmo de búsqueda de Zig-Zag
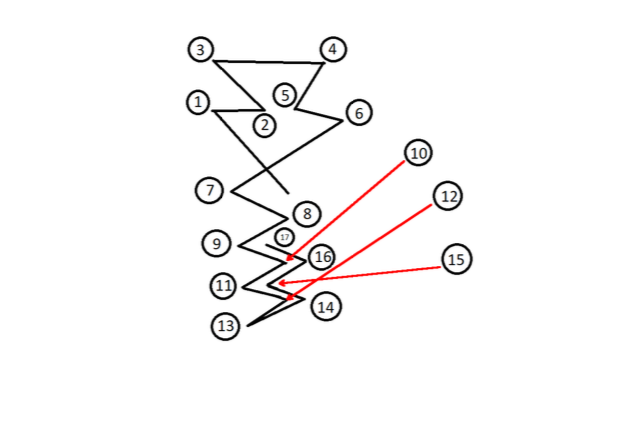
Este algoritmo cubre la mayor parte del área del cuadrado en un movimiento Zig-Zag. Debido a la persistencia y simetría de este algoritmo, solo se necesitan dos ángulos para poder replicar este patrón. Los dos ángulos fueron 3π / 4 y 5π / 4. En la implementación, solo se modificó el controlador de búsqueda en el paquete comportamientos. Sin embargo, para hacer este algoritmo, hicieron diecisiete waypoints. Primero, se comenzó por asegurarse de llegar lo más cerca posible a una esquina. Entonces, a partir de ahí, se comenzó a hacer el algoritmo de búsqueda Zig-Zag; desde la parte superior, hasta el final.
Outreach
Los Estudiantes de la NASA tienen el reto de realizar actividades de ou con los estudiantes en nuestras comunidades para desarrollar las habilidades y generar interés en la informática y la robótica. En Puerto Rico, los estudiantes de K-12 no tienen la oportunidad de aprender sobre los conceptos básicos de ciencias de cómputos ya que este tema no está incluido en el currículo. Es muy importante que los estudiantes puertorriqueños puedan experimentar al menos una vez de qué se trata la informática y la ingeniería antes de ingresar a la universidad.

El equipo está formado por estudiantes del departamento de ciencias de cómputos que ha tenido una diferentes experiencias en la robótica. Algunos de ellos han trabajado anteriormente con una variedad de plataformas, pero para otros, la NASA Swarmathon es su primera experiencia con la robótica. Por esta razón, quisieron aprender y enseñar sobre robótica y otros temas relacionados con esta iniciativa a estudiantes de secundaria y a la comunidad.
Nuestro Equipo
Profesora del Departamento de Ciencias de la Computación en la Universidad de Puerto Rico en Arecibo (UPR-Arecibo). Desde 2015, es la mentora de un equipo de Nasa Swarmathon en UPRA.

Eliana Valenzuela-Andrade
Líder del proyecto, sus tareas incluyen la adaptación de módulos originales, el desarrollo de talleres y la tutoría para los equipos de división de escuelas secundarias.

Jesus Santana-Roman
Trabajó en la modificación de los módulos originales, desarrollo de talleres y tutoría para los equipos de división de la escuela secundaria.

Marcos Bosques-Perez
Líder del equipo físico y brindó apoyo logístico en nuestro proyecto de outreach.

Stephanie Peña-Rivera
Ayudó a desarrollar algoritmos y a brindar apoyo logístico en nuestro proyecto de outreach.

Kendrick Morales-Ortiz
Brindó apoyo logístico y ayudar a estudiantes de secundaria en los talleres de outreach.

Christopher Morales-Ramos
Formó parte del equipo de pruebas de módulos de outreach adaptados. Además, brindó apoyo logístico en nuestro proyecto de outreach.

Kenneth Gonzalez-Nieves
Formó parte del equipo de pruebas de los módulos, también proporcionó apoyo logístico y de documentación en nuestro proyecto de outreach.
Hiram Vera-Mercado
Formó parte del equipo de pruebas de módulos de outreach adaptados. Además, brindó apoyo logístico en nuestro proyecto de outreach.
Alejandro Zeno-Miranda
Taller en la Escuela Vocacional Antonio Luchetti en Arecibo

En este taller les presentaron Swarmathon, Swarm Robotics y las versiones de los módulos de netlogo.
Actividad del campamento de verano CS4Girls17

Premiaciones
3rd Place Technical Report on Physical Team